方向余弦和梯度
方向余弦
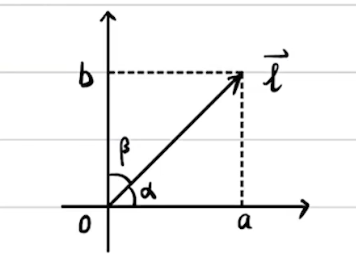
我们首先来通过二维向量来理解一下,方向余弦的定义:
在平面指教坐标系中,一个向量 , 它和 轴的夹角为, 它和轴的夹角为那么 , 那么 ,就叫作向量的方向余弦。
这个向量的长度我们也很容易的算出来:
那么,我们的方向余弦就是:
将 带入第二个式子,我们就可以知道,方向余弦的平方和等于 1.
其实我们就可以知道,其实向量的方向余弦组成的向量 = 该向量方向上的单位向量。
下面的图像帮助我们理解:
方向导数
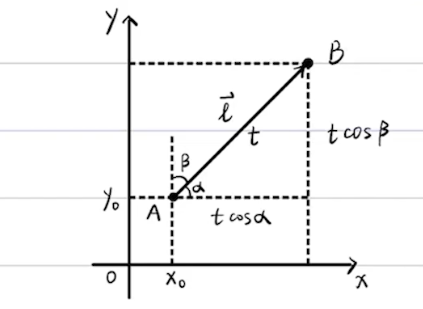 我们了解完了方向余弦的定义之后,我们来看方向导数。其实我们知道导数的定义其实最本质的就是, 让 趋于 的值,就是我们导数的最根本的定义。 我们研究偏导数是让当常数或者当常数(二元的情况),另一个变化来研究函数的在这一方向的变化率的。那在研究方向导数的时候,我们其实是要求两个变量都要变(二元的情况),如上图:从点 移动到点 ,点变化到点的方向与轴的正方向的夹角是,与y轴正方向的夹角是,自变量的增量我们记作, 沿方向 增量分量:
我们了解完了方向余弦的定义之后,我们来看方向导数。其实我们知道导数的定义其实最本质的就是, 让 趋于 的值,就是我们导数的最根本的定义。 我们研究偏导数是让当常数或者当常数(二元的情况),另一个变化来研究函数的在这一方向的变化率的。那在研究方向导数的时候,我们其实是要求两个变量都要变(二元的情况),如上图:从点 移动到点 ,点变化到点的方向与轴的正方向的夹角是,与y轴正方向的夹角是,自变量的增量我们记作, 沿方向 增量分量:
t其实是我们向量的模长,我们因变量的增量我们记作,是B点的函数值,是A点的函数值。那么我们分子就可以用三角函数的知识把增量表达出来:
那么上面的式子就是我们方向导数的完整定义式。
当我们可偏导,则方向导数和偏导数的关系:
若 为 轴正方向,则 ,,有 ,, 化为
。
为 轴正方向,则 ,,有 ,, 化为
。
所以我们就知道其实偏导数其实是方向导数的特例。
上面其实我们用的是导数的定义来证明的,接下来我们来用全微分的定义,来推倒一下我们更常见的形式。
若可微,则:
又因为,,所以上面的式子化为:
然后我们两边同时除以,取极限,是不是左边就变成了我们上面用导数定义去定义的方向导数的式子, 而右边就变成了, 那么是不是就可以用就可以变成向量的点乘,把这个结果拆开了:
那么我们就由此引入了梯度的概念,在二元函数的情况下,这个我们就定义成了梯度向量的概念。
是梯度向量的表示方式,所以方向导数的定义我们还可以通过上面的式子这样写:
解释一下就是:一点的方向导数就等于方向余弦乘以我们的梯度向量。
一个函数在某点处的方向导数其实是等于 方向余弦点乘梯度,方向肯定是可以变的,梯度向量(梯度函数)我们一旦函数的一个点确定了,也是不可以变的了(即方向都是定了的)。
但是我们的方向方向导数是可以360°去变的,那么接下来,我们就研究一下,方向导数到底是怎么去变的?
这里我们使用一下向量点乘的规则,两个向量点乘,就等于两个向量的模相乘再乘以他们夹角的余弦值。那么:
又因为这个是方向余弦是个单位向量,长度为1,那么我们就可以得出,一个函数在一点的方向余弦其实是跟夹角的余弦值只是有关系的。
所以 。
那么 的时候,,那么也就是说,当为的这个l向量就是沿着我们的梯度向量的方向的时候,我们的方向导数最大,最大就是梯度向量的模;
那么的时候,, ;
当 的时候,此时l 向量是沿着我们梯度向量的相反方向时候,,此时方向导数最小。
如果排版看着不舒服,可以去语雀看